Роботи, створені командою, що працює в Каліфорнійському університеті міста Санта-Барбара, в здатні дивитися крізь монолітні стіни, використовуючи при цьому прості сигнали Wi-Fi. Застосування цих пристроїв передбачається при проведенні пошукових операцій, при забезпеченні порятунку постраждалих, у цих роботів є здатність ідентифікувати положення і схематично відображати невидимі об'єкти в переглянутій зоні, а також визначати, що це - метал, деревина чи людина.
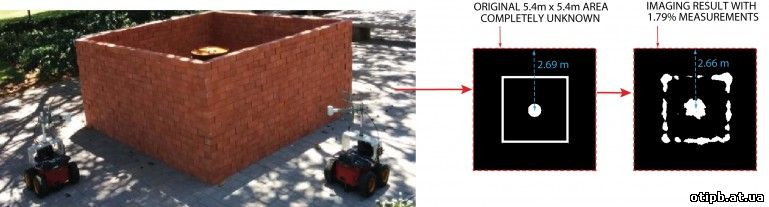
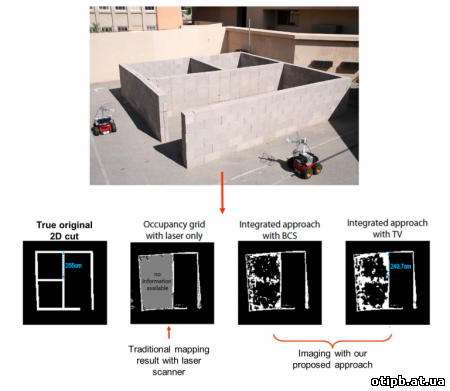
Працюючи попарно, роботи "обходять" периметр об'єкта і по черзі відправляють і отримують сигнали Wi-Fi один одному крізь досліджуваний об'єкт. Використовуючи відмінності в переданих та отриманих сигналах Wi-Fi, система будує модель розподілу хвиль з цільовою резолюцією приблизно 2 см (0.8 в). Вимірюючи отримані значення цих бездротових сигналів, роботи в змозі створити точну карту.
Хоча це і не перші такі роботи, які були в змозі бачити наскрізь бетон так робот-спостерігач Cougar20-H зміг це кілька років тому - але на відміну від нової розробки UCSB інші системи використовували в роботі кілька GHz-діапазонів, потужні радіо-датчики, які були надзвичайно складними радарними системами.
Роботи UCSB в своїй роботі покладаються на інтерпретацію переданих сигналів по Wi-Fi, які - навіть при тому, що вони поки що мають і більш низьку силу і набагато більш низький динамічний діапазон експерименти вказують, що якість обробки сигналу і обчислення стали їх головною перевагою при виконанні поставлених задач. Це підтверджено в звітах команди.